SkyMap Gimbal & Payload Design
As part of the University of Waterloo's 4th Year Mechatronics requirements, students were required to complete a capstone design project.
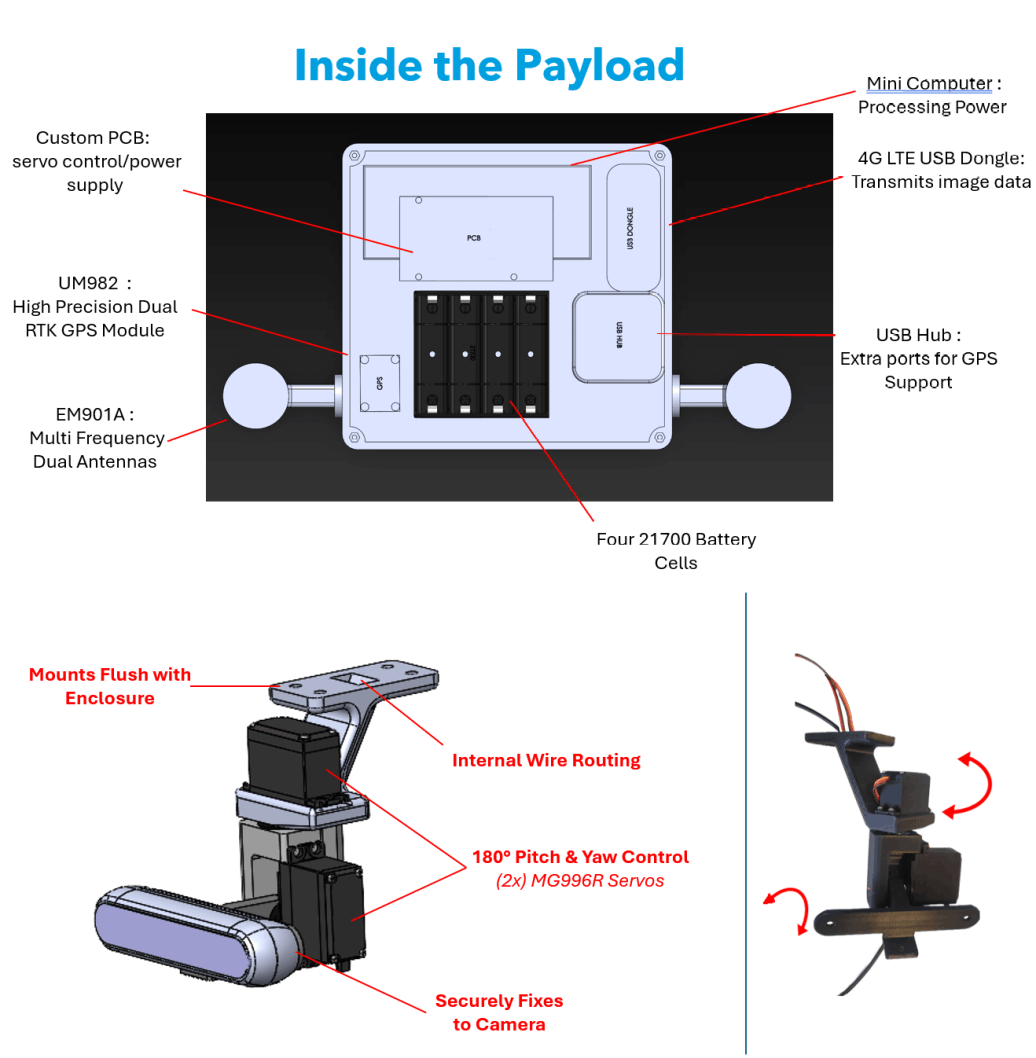
SkyMap is a drone payload system that enables high fidelity scans of building exteriors for surveying purposes.
As part of the team I contributed to the payload housing design and designed a servo gimbal system to articulate the LiDAR Stereo Vision camera system during flight.